Framework
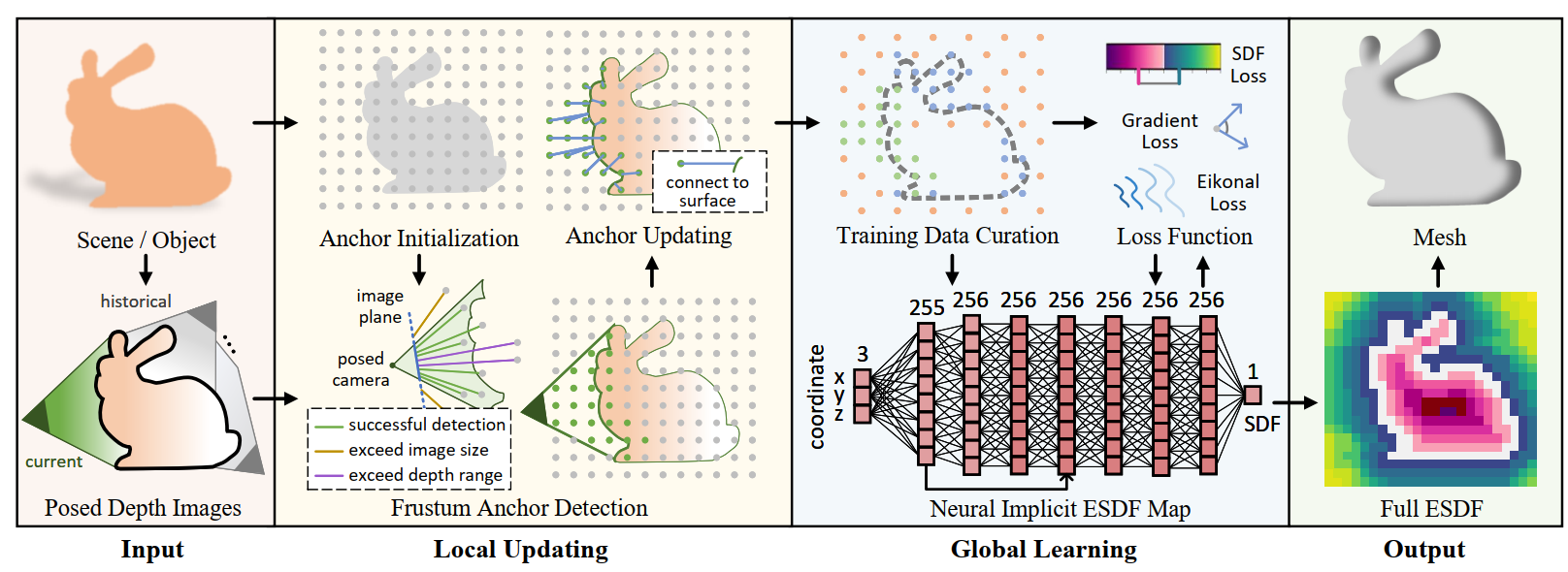
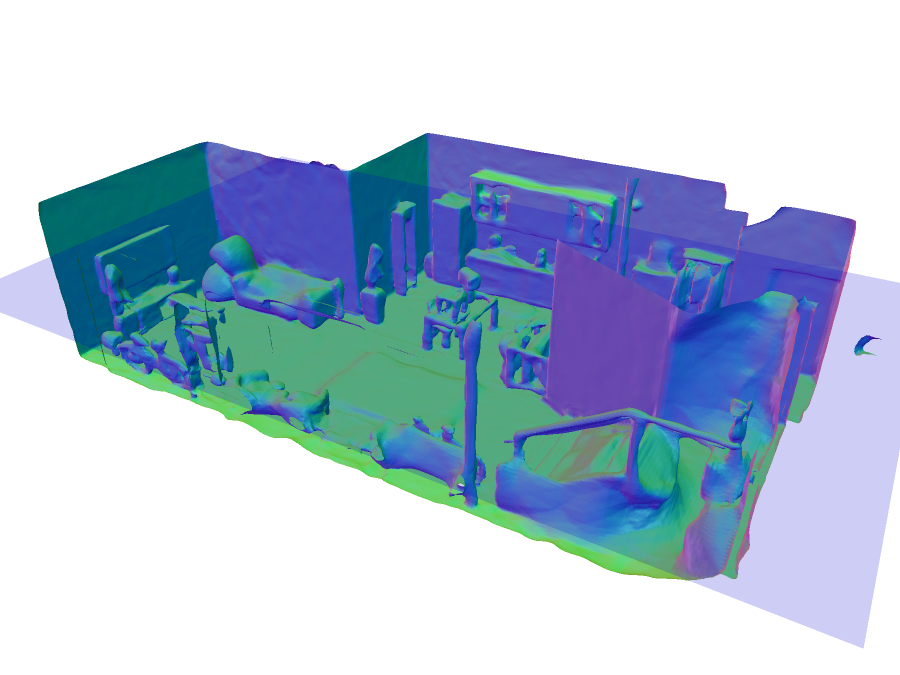
LGSDF takes a sequence of posed depth images as input and continuously trains a randomly initialized neural network as the final implicit ESDF map. LGSDF consists of two main modules: the front-end and the back-end. The front-end Local Updating Module focuses on incrementally updating local anchors based on current observations. In contrast, the back-end Global Learning Module handles the curation of training data (i.e., anchors) and employs specific network optimization strategies. As the posed depth images are continuously input, the network gradually restores the full SDF of the observed scene.